
Blob Bot Icosahedron Robot
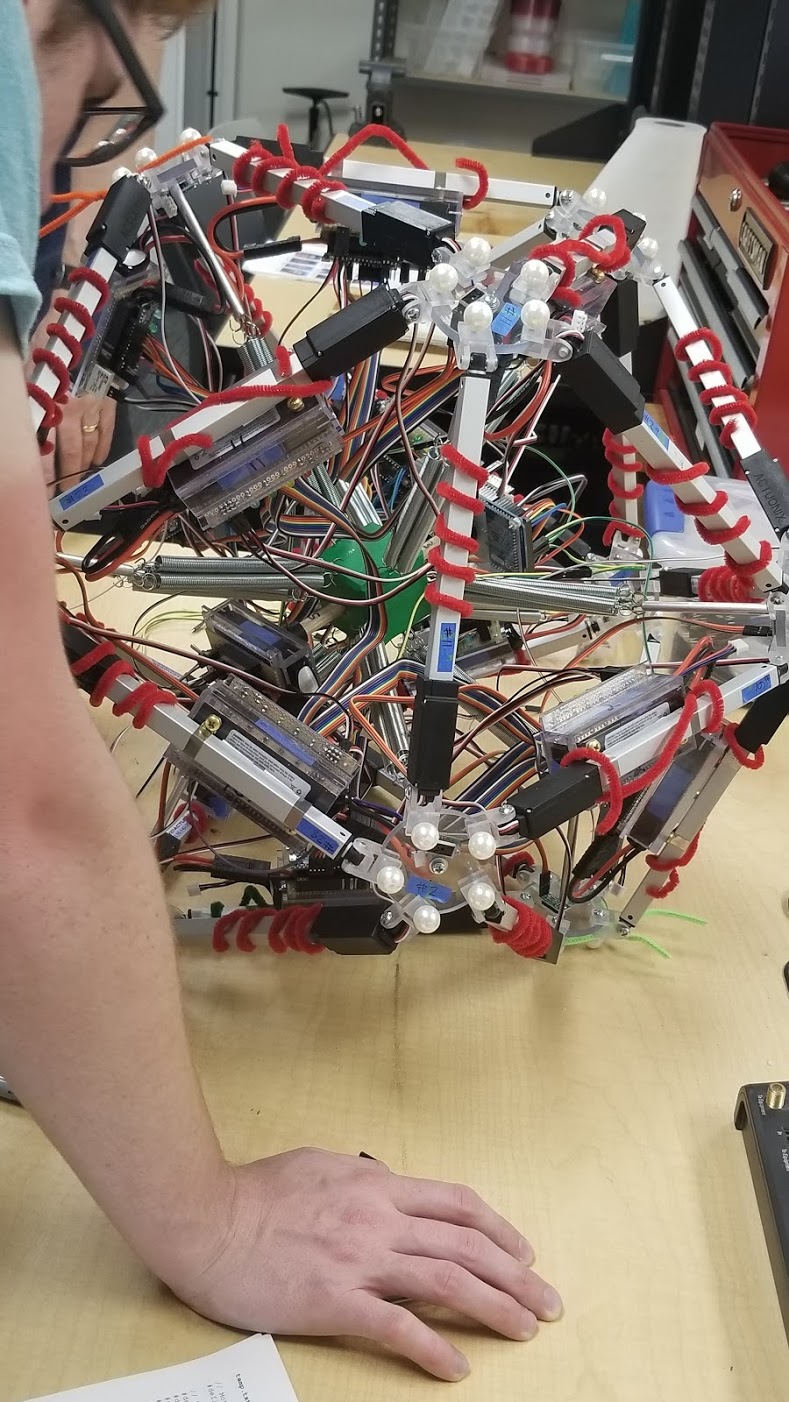
“Blob Bot” was the result of a one semester long collaborative project for Robot Construction Lab. The class collectively designed, built and tested a novel robot concept: an Icosahedral robot with servo actuators as edges. The edges could expand and contract, drastically changing the shape of the robot. This allowed the robot to roll around by adjusting the lengths of the edges and shifting around the weight distribution. The goal of the project was to design a robot capable of adjusting its shape, allowing it to navigate tight spaces. IR sensors on the vertices help the robot determine its orientation, detect obstacles and plan motion. In addition, the user can interact with the robot by covering different sets of sensors on the top of the bot while it is at rest.
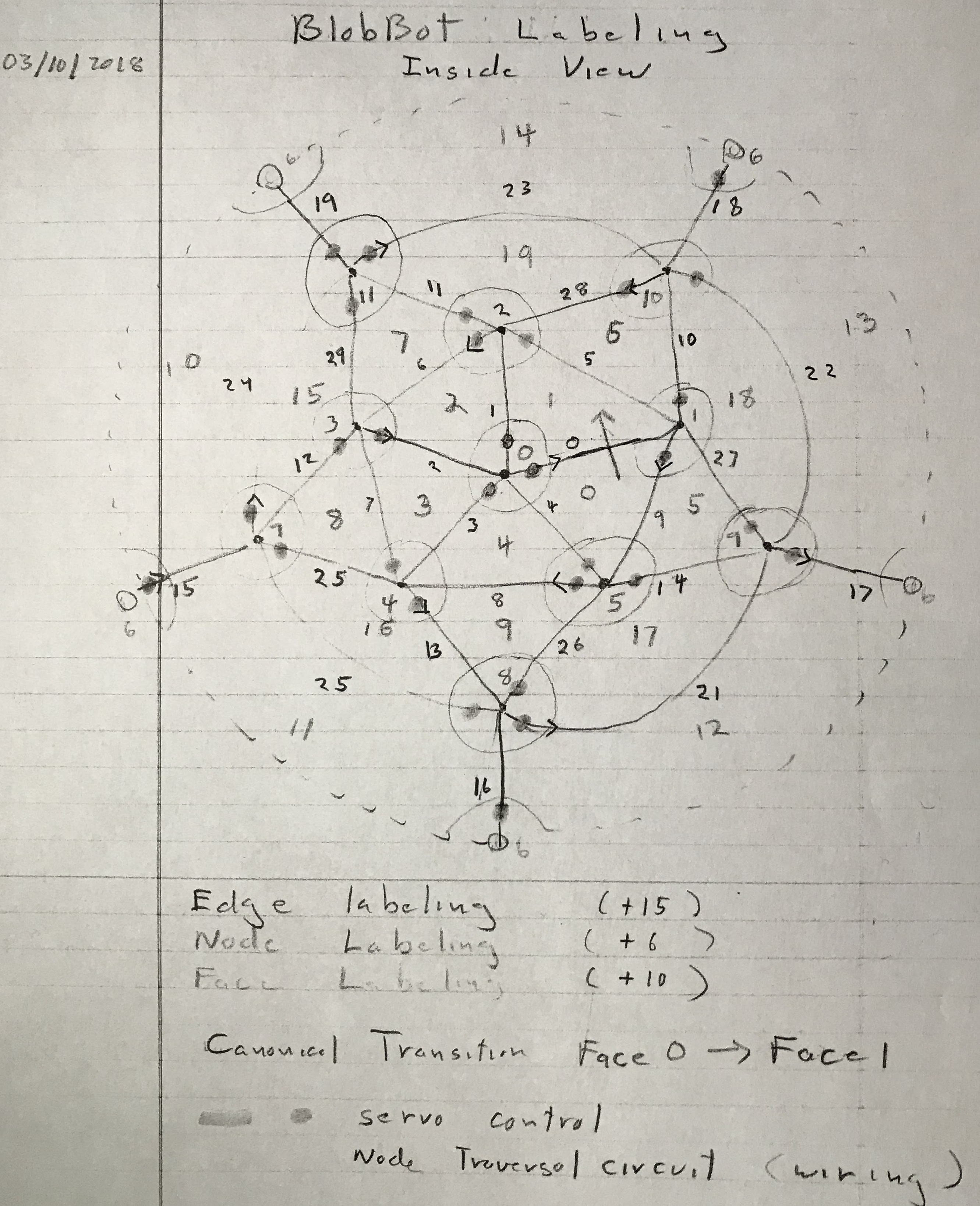
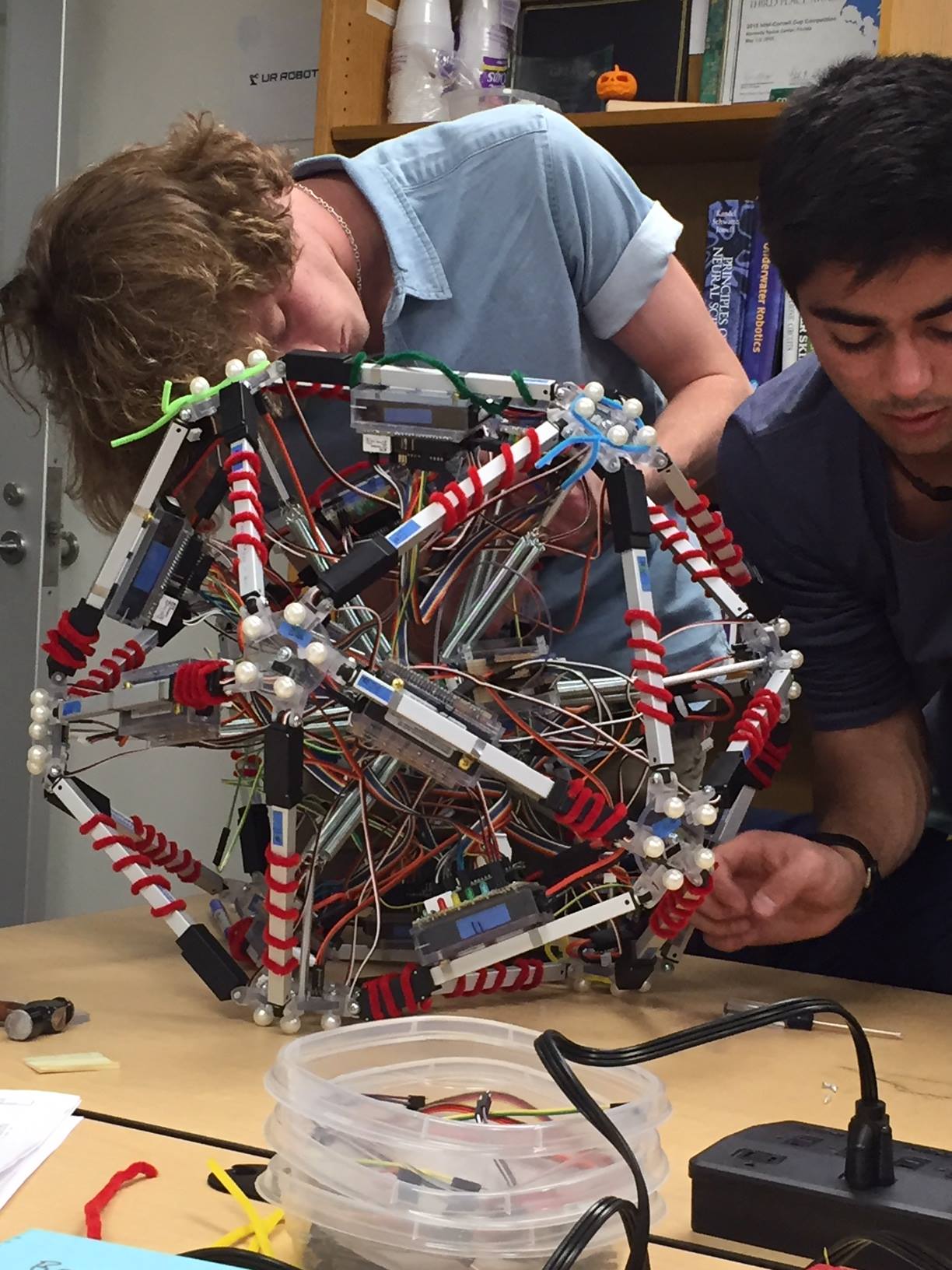
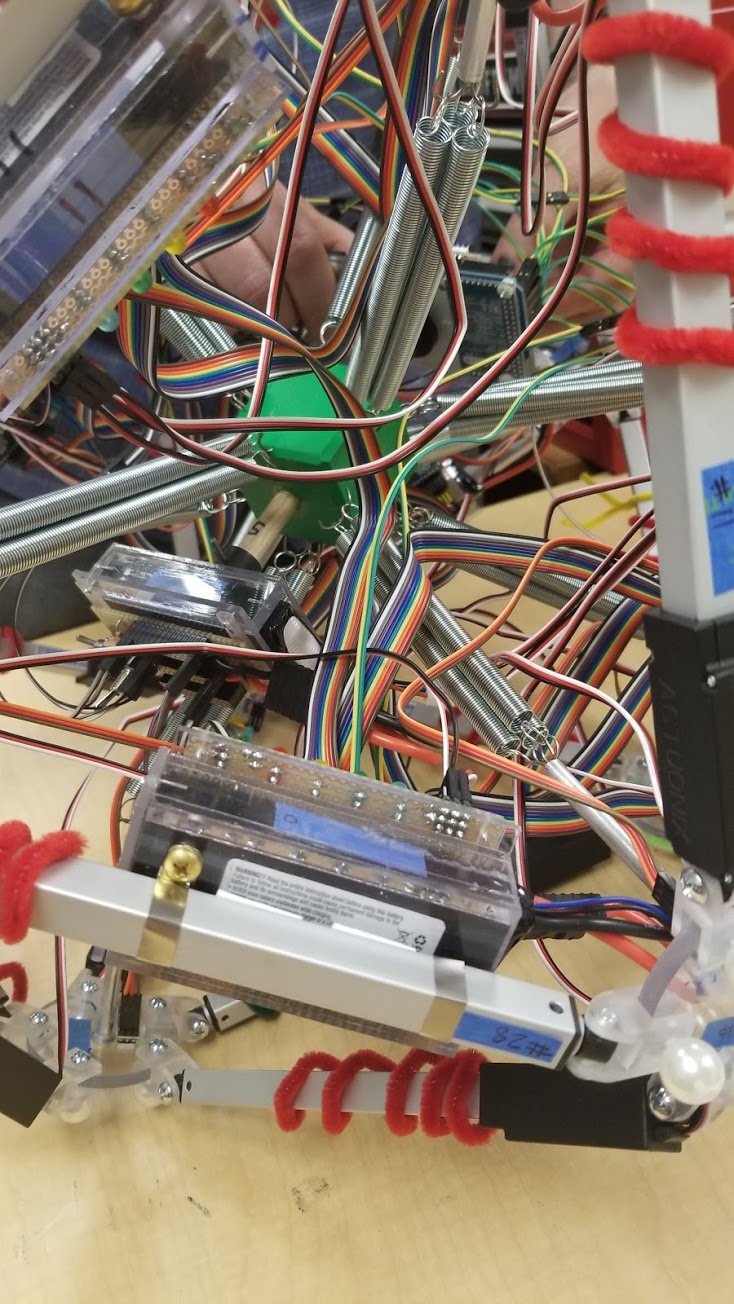
Springs were used to suspend the “brain” in the center of the bot with the right stiffness to allow the bot to expand but not lose tension when the actuators are fully contracted. All mechanical parts on the robot where machined out of polycarbonate using templates that we made from Delrin and aluminum to speed up the manufacturing process.I personally worked on machining the joints of robot, designing and fabricating the node circuit boards and worked on developing the motion mapping algorithm and implementation in C. The final robot was presented at Rochester Design Day 2018.