
Solar Splash
Solar splash is probably the longest ongoing project I have worked on. I first joined the club during my sophomore year back in the fall of 2017. Rochester Solar Splash is a multidisciplinary club where members work to design and build a solar/electric boat to compete annually against other universities. Each year, we make modifications to different subsystems of the boat to improve its performance. More information about the Solar Splash organization and competition can be found here.
2016-2017 Season
The 2016-17 season was my first experience with solar splash and I came in with some basic woodworking skills and very little practical engineering experience. The team was in the middle of building a cedar strip hull so my first project was to help assemble the hull. We first glued the strips of cedar to a set of CNC cut stringers and then coated the put down a layer of fiberglass and epoxy. After the hull was completed, I designed and built an aluminum truss system to support the solar panels on the boat.

At the end of the year, I joined 3 other team members at competition for a week where we displayed our boat and competed in a variety of different events designed to evaluate different aspects of the boat. To say that our boat’s performance did not meet our exceptions would be an understatement. I went in to competition knowing very little about any part of the boat other than the hull so I was completely unaware of how underprepared we were. Our boat ran into a number of problems and we spent most of the week fixing all problems that came up and learning from the other teams. At the end of the week we ended up winning the infamous “Perseverance Award” to complement our last place finish. There is nothing that will inspire you to work harder quite like a winning participation award at an engineering contest for college students.
2017-2018 Season

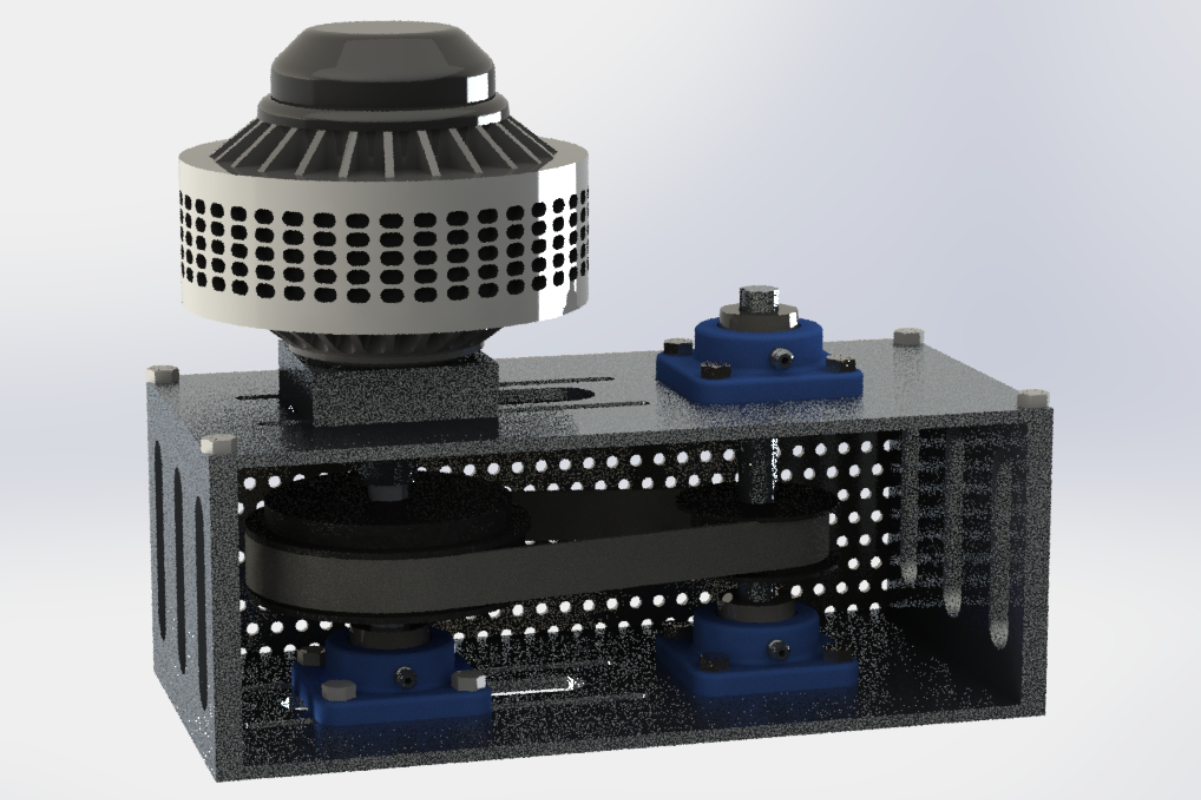
After return from an altogether less than ideal 2016-2017 season, we sat down at the beginning of the year and picked apart all the problems with our existing system, and there were lots of them. Most of the older members in the club had graduated so those of us who had attended competition the previous year took the lead on planning the improvements we needed to make. We started by planning improvements for our drivetrain. Our boat uses a 1968 Evinrude outboard which we converted by removing the cooling pipes, reshaping the cavitation plate and adding a custom upper unit that couples to the shaft. We needed to redesign the upper unit so we could adjust the belt tension on the two H pulleys that gear up our motor before the driveshaft. One big change that we made was the addition of an interchangeable motor system where we could swap out our Lynch axial flux sprint motor for a smaller BLDC motor for the endurance event. We also needed to add bearings to prevent the drive shaft from becoming misaligned and vibrating excessively. I lead the team designing the upper drivetrain and the assembly for the final assembly is shown below.
In addition to the drivetrain, we realized that the beautiful cedar strip hull we had built the previous year had some significant stability and drag issues which significantly hurt our performance in both sprint and endurance events. For testing we switched back to using a purchased hull while we started researching how to make a hull to fit our competition needs. We started learning how to build CFD models in ANSYS CFX to characterized the performance of both of our hulls. We quickly realized that designing a proper hull would take more time that we had considering the other important tasks we still had to complete before competition. From our research, we also learned that the pre-made hull we were using was almost exactly what we needed so we put the new hull project on hold.
As competition approached, we were only able to make some minor improvements to be boat because there was just way too much to do and we spent most of the year figuring out what we needed to fix and how to do it. Despite not finishing everything we wanted to get done, we still planned to go to competition mostly just to get more experience competing and to learn from the other teams. While running some final tests on our system only a few weeks before competition, our sprint motor overheated and the armatures melted due to a misconfigured motor controller setting. Repairs would have taken to long and would have been too costly so we decided to withdraw from competition. Despite being unable to compete, the year was far from wasted because of the all that we had learned about our system and what we needed change.
2018-2019 Season
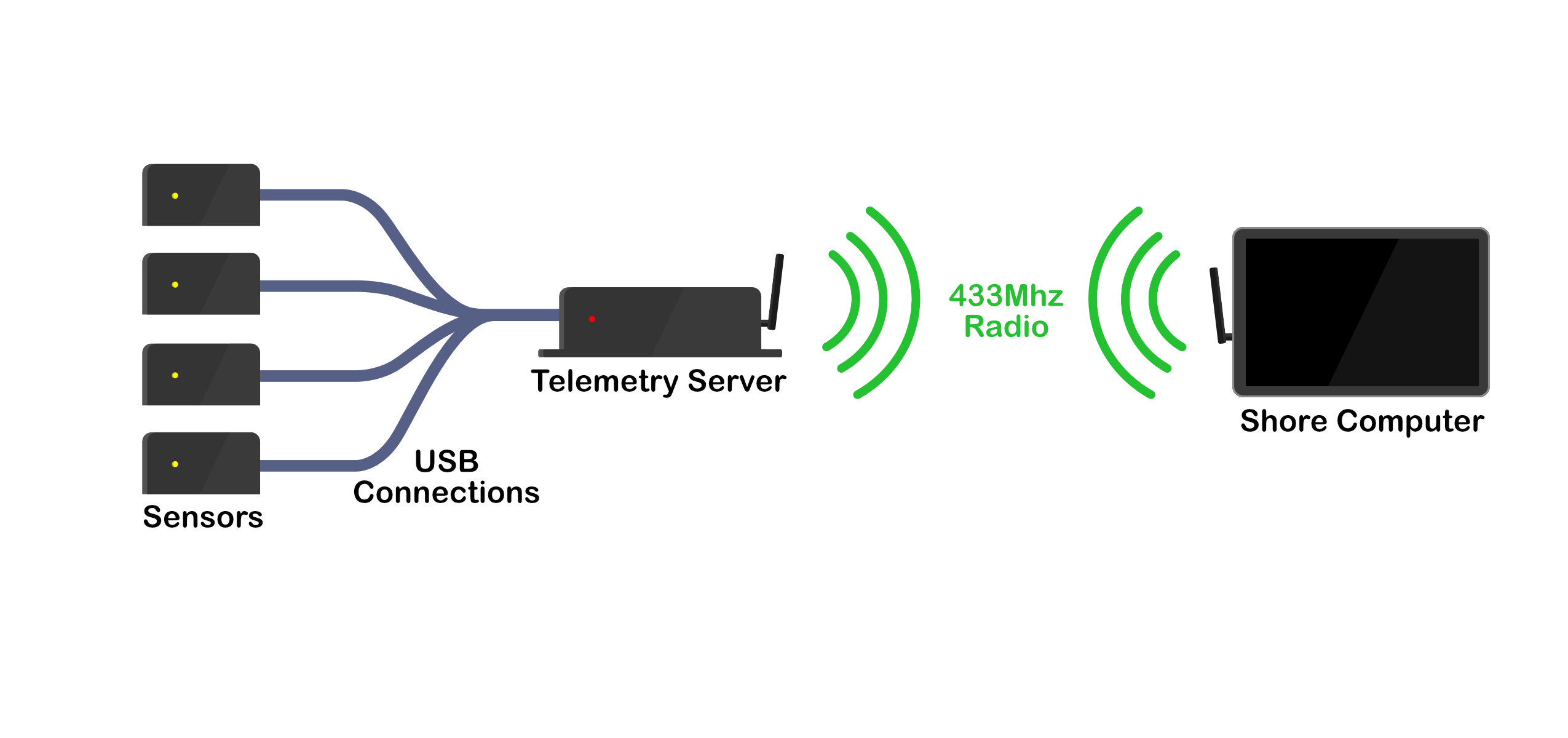
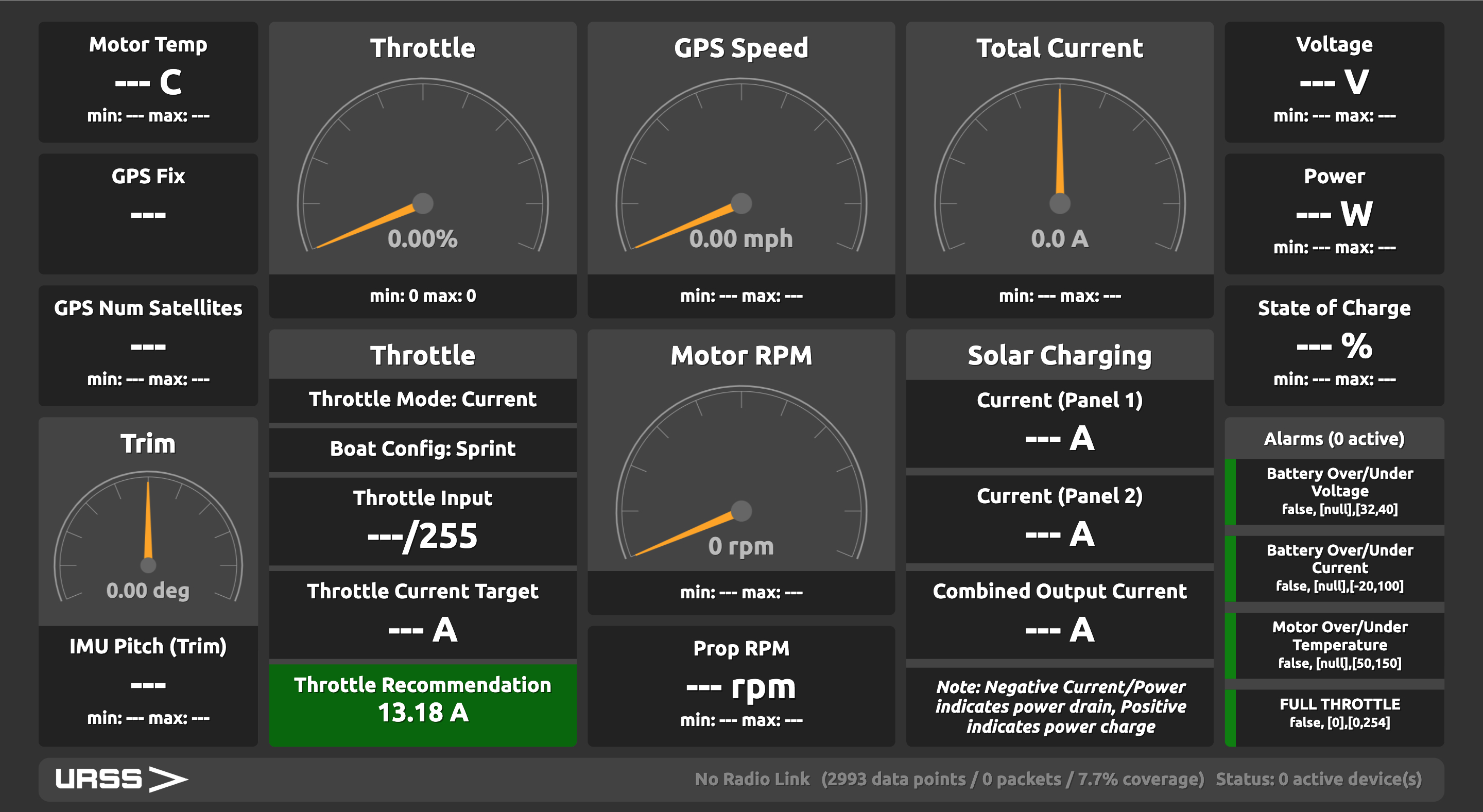
Going into the 2018-2019 season, we decided that if we ever wanted to design a boat to meet our performance expectations, we needed to implement a robust telemetry system to collect data about all aspects of the boat. We simply could not accurately determine where the problems were in our system without the data to explain what was happening. We started designing a networks consisting of a Raspberry Pi which functioned as a server for the data which connected to various microcontroller sensors around the boat. The server collects and displays the data on a display on the boat and then forwards the data to a shore computer over a 433mhz RF transceiver. This allowed us to get a better picture of what was going on in the boat so we could make informed decisions on what needs improvement.
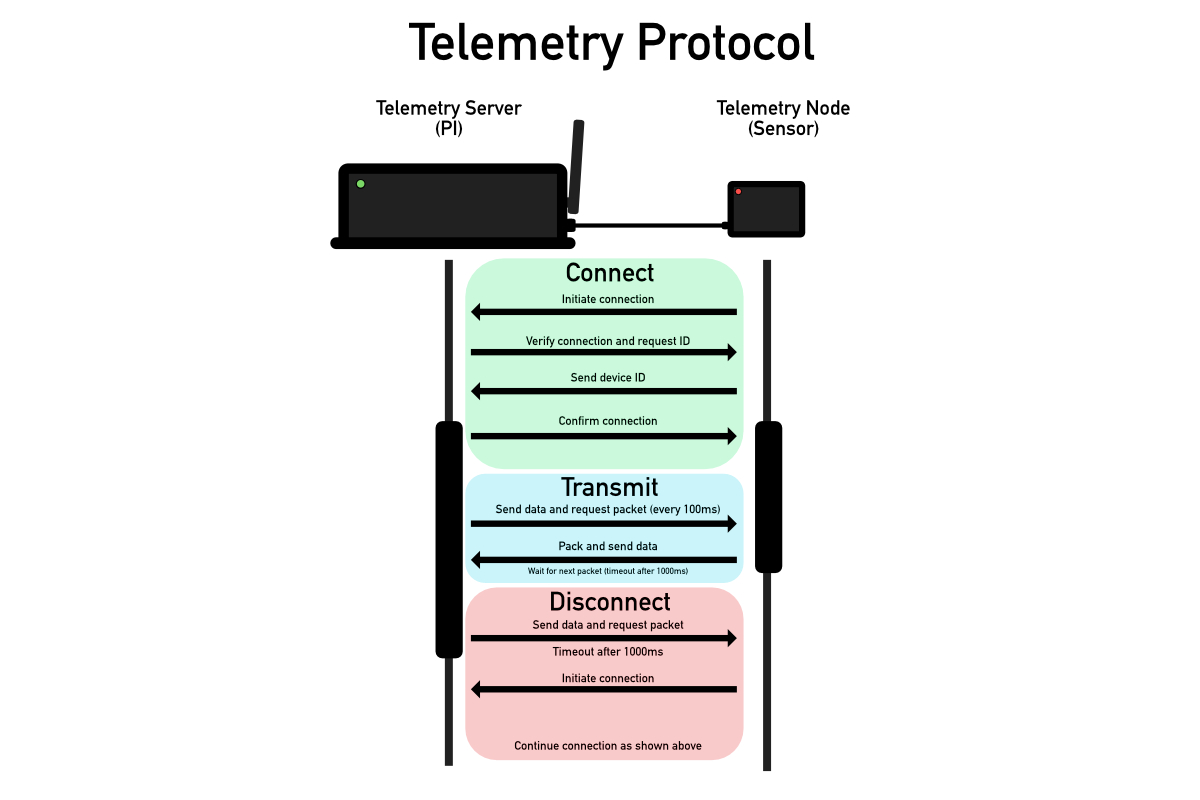
We worked on a variety of sensors for the boat such as a GPS board, a board to read data from the Alltrax motor controller, a board to read battery voltage and current, incoming solar power and a sensor to read motor RPM and temperature. I personally worked developing a protocol to communicate between the sensors and the server using USB serial. This protocol allows the server automatically detect to devices that are plugged in, query them for data and send data back to the nodes. All data is packed efficiently into 16 byte packets behind the scenes and verified with a checksum. It is set up so that data will be transferred at up to ~10hz and the protocol will handle timing out devices that haven’t responded in 1 second and to automatically reconnecting. The server then forwards data to UI software that the team developed using Electron.js.
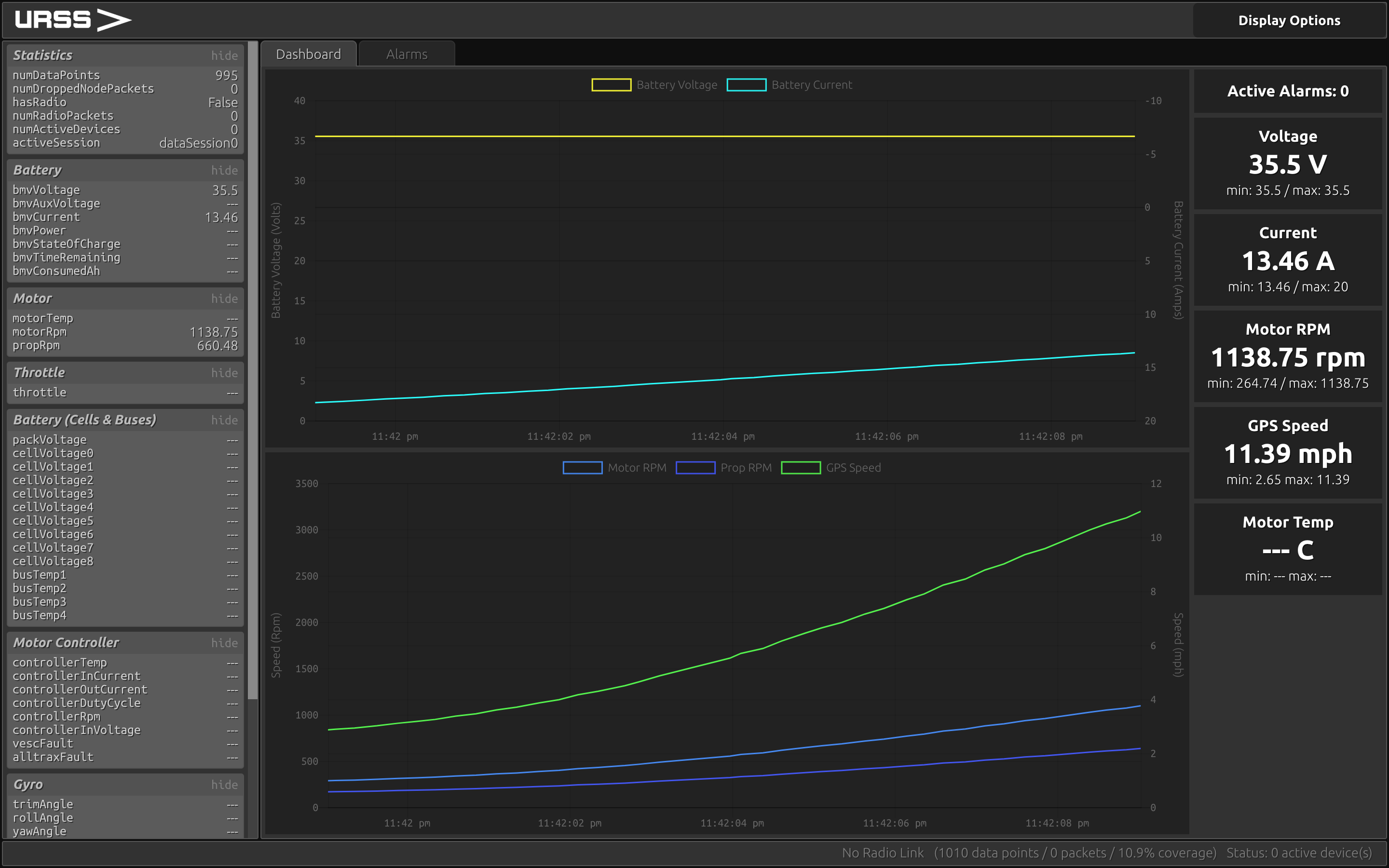
The Electron UI is used on the shore where the computer can afford the processing power to run a full chromium instance without interfering with the timing of the hardware on the board. On the boat dashboard, a similar interface written with raylib/openGL in C is used for a lightweight display showing the driver the important data on the dashboard display.
In addition to telemetry, the team replaced the broken sprint motor with a more powerful Lynch motor more suited for a boat and machined a direct drive upper unit which we connected to the same outboard lower unit. We also took our hull and replaced a lot of the old fiberglass and waterlogged wood. This made the hull both lighter and stronger.
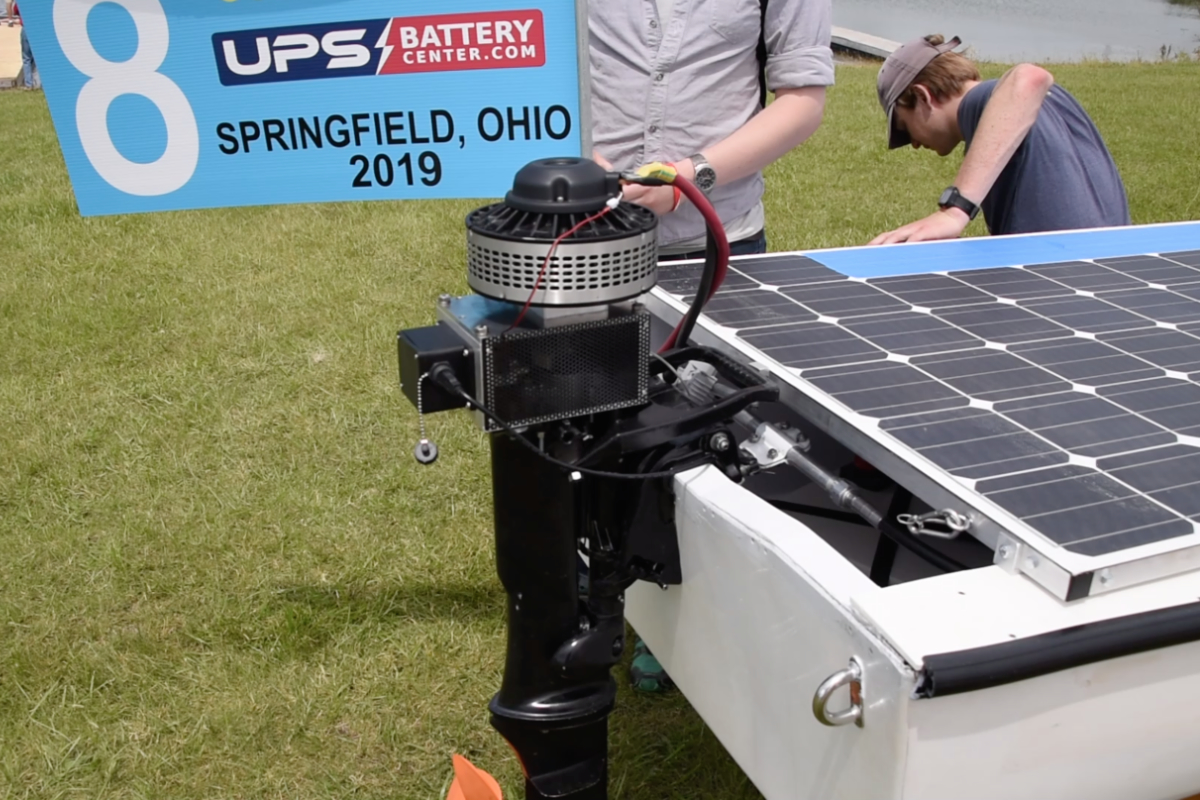
2019 competition
The work that the team put in the two years since our last competition paid off at the 2019 competition held in Springfield, Ohio. The week culminated in a 5th place finish overall out of the 11 teams that made it to competition. We took more than 20 sec off our previous best 300m sprint time and trippled the number of laps we completed in the 4hr endurance race. During the endurance competition, we were able to hit the same number of laps in the first and second half of the race running on just batteries charged by solar. We credit this to the telemetry system we designed allowing us to make adjustments to our system prior to competition and also help the skipper make informed driving decisions from monitoring the energy use of the system in real-time.

The team was awarded the Innovation Design Award for our telemetry system, this was particularly meaningful to me because I came up the the initial concept for our telemetry system and was one of the main engineers developing this important part of our boat.

The team received following awards at 2019 competition:
- Endurance: 4th place
- Technical report: 3rd place
- Visual display: 1st place
- Workmanship: 2nd place
- Video Award: Best Video
- Overall: 5th place
- Most Improved: Improvement of over 300 points out of 1000
- Innovation Design Award: for modular telemetry system
